PxrWorley
PxrWorley
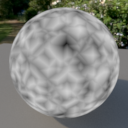
すべてのテクスチャスタイルノードと同様に、このノードは、2Dまたは3D領域を表現したマニフォールドを取得して、そこにWorleyノイズテクスチャを適用します。 マニフォールドがない場合のデフォルトの挙動は、3DのPに適用されます。 このノードは、Steven Worley氏により表現されたWorleyノイズを計算します。
入力パラメータ
Frequency(周波数)
セルのサイズを制御します。周波数が高いとセルが小さくなります。
RIB: float frequencyデフォルト: 4.0
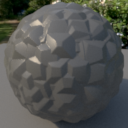
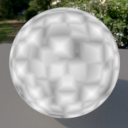
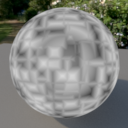
Distance Metric(距離の測定基準)
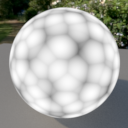
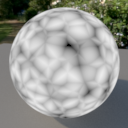
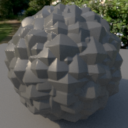
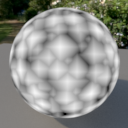
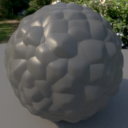
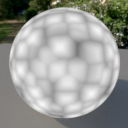
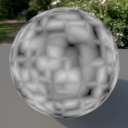
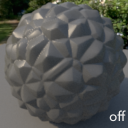
隣接するセルまでの距離を測定する手段。 Manhattan距離は長方形の形状になり、Euclidian距離は球形の形状になります。
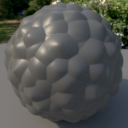
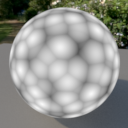
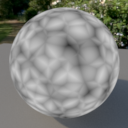
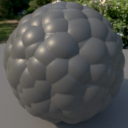
Value Metric C1 inverted displ C1 inverted C2 inverted 0 Euclidean: 最も近いポイントまでのユークリッド距離を計算します。 Squared Euclidean距離よりも先が尖ったように見えます。 1 Euclidean Squared: 最も近いポイントまでのユークリッド平方距離を計算します。 単なるEuclidean距離よりも丸く見えます。 2 Manhattan: マンハッタンの格子状の街路にヒントを得たもので、セルの境界の周りだけを移行できる場合、最も近いポイントまでの距離です。 3 Chebyshev: チェス盤距離とも知られ、いくぶんかManhattan距離に似ていますが、45度の回転を使用します。 4 Minkowski: EuclideanとManhattanの距離の両方を汎化したものです。 この指数により、EuclidianからManhattanまでパターンが移行します。
注: これは他の距離測定基準よりももっと処理が重いです。
Jitter(ジッター)
セルの歪みを制御します。
RIB: float jitterデフォルト: 0.75
C1
1番目の特徴までの距離に対する乗数。
RIB: float c1デフォルト: 0.8
C2
2番目の特徴までの距離に対する乗数。
RIB: float c2デフォルト: -0.2
Minkowski Exponent(ミンコフスキー指数)
Manhattan(1.0)からEuclidean(2.0)、そして常識の範囲を超えた未知の領域まで、距離の移行をスムーズにします。

C1 inverted

C2 inverted
RIB: float minkowskiExponentデフォルト: 4.0
Shape(形状)
計算した距離を修正して別の形状を作成します:
- 0: Linear
- 1: Cosine
RIB: int shapeデフォルト: 0
Clamp(クランプ)
結果の距離を0.0から1.0までの範囲にクランプします。
c1: 1.0
c2: -0.95
distancemetric: Euclidean
RIB: int clampデフォルト: 1
Invert(反転)
最終パターンを反転します。
RIB: int invertデフォルト: 0
Manifold
ノイズの適用先となるマニフォールド(デフォルトはP)。
RIB: struct manifold
出力パラメータ
- resultF
- Worleyノイズテクスチャの結果。